CNN神经网络
卷积神经网络
从全连接层到卷积
全连接层的缺点:参数爆炸
- 场景引入:比如用多层感知机给百万像素的猫狗照片分类,输入层有 100 万像素,即使隐藏层只有 1000 个神经元,仅这一层就需要 10 亿个参数(100 万 ×1000)。
- 问题核心:参数太多,训练起来需要大量数据、算力和时间,几乎不可行。
- 关键原因:全连接层假设所有像素之间都有关系,但图像其实有 “局部性” 和 “平移不变性”,全连接层没有利用这些特性。
卷积神经网络的两大核心原理
- 平移不变性:位置无关,特征不变
- 类比理解:就像找 “沃尔多”(图 6.1.1),不管他出现在图片哪个位置,他的红条纹衣服、眼镜等特征不变。
- 卷积神经网络用一个 “特征检测器”(卷积核)扫描全图,只要某个区域出现目标特征,检测器就会响应,不管这个区域在图片左上角还是右下角。
- 数学意义:同一个卷积核(权重)在图像的所有位置共享,不随位置改变而变化,大幅减少参数数量。
- 局部性:只关注相邻区域,不操心远处
- 现实依据:图像中物体的特征通常由局部像素组成(比如眼睛由周围几个像素的明暗构成),不需要关注整个图像的所有像素。
- 具体做法:卷积核只处理某个固定大小的局部区域(如 3×3 像素的窗口),每个隐藏单元只与输入图像的局部区域相连,而非全部像素。
- 效果:进一步减少参数,同时保留关键局部特征。
卷积的数学本质与实际应用
假设你有两个函数(或数组):
- 函数 f:代表原始信号(如图像的像素值)。
- 函数 g:代表一个 “过滤器”(如卷积核,用于提取特征)。 卷积的核心步骤:
- 翻转过滤器:先将 g 函数左右、上下翻转(数学定义要求,实际应用中可能直接使用未翻转的核,结果称为 “互相关”,但深度学习中常统称 “卷积”。)
- 滑动窗口:将翻转后的 g 逐行、逐列滑动到 f 的每个位置上。
- 相乘求和:在每个位置,将 g 与 f 重叠区域的对应元素相乘,再将结果相加,得到一个新值。 例子(离散数据,二维图像):
- 输入图像(3×3 像素):
0 1 2
3 4 5
6 7 8
- 卷积核(2×2,未翻转时):
0 1
2 3
- 翻转后的卷积核:
3 2
1 0
- 计算左上角第一个输出值:
翻转后的核与图像左上角 2×2 区域重叠:
0*3 + 1*2 + 3*1 + 4*0 = 0 + 2 + 3 + 0 = 5 - 输出图像(2×2 像素):
5 11
23 24
卷积在深度学习中充当特征提取器
在卷积神经网络(CNN)中,卷积操作的目标不是数学意义上的信号分析,而是自动提取数据中的特征,具体特点如下:
- 局部感知:只看周围一小片区域
- 卷积核的大小通常远小于输入图像(如 3×3、5×5),每次只处理图像中的一个局部窗口(如边缘、纹理),而非整个图像。
- 类比:就像用放大镜观察照片,每次只关注局部细节(如猫的胡须),再通过多层卷积组合成整体特征(如猫的头部)。
- 权重共享:一个核用遍全图
- 同一个卷积核的所有参数在图像的所有位置共享,不会因位置不同而改变。
- 好处:大幅减少参数数量。例如,一个 3×3 的卷积核在 100×100 的图像上滑动,只需学习 9 个参数,而非 100×100 个参数。
- 多通道处理:同时提取多维度特征
- 彩色图像有 RGB 三个通道(红、绿、蓝),卷积核会为每个通道单独设计权重,再将结果相加,输出新的 “特征图”。
- 类比:相当于用不同滤镜(如边缘滤镜、颜色滤镜)同时处理图像,每个滤镜输出一个特征图,代表图像某方面的信息。
卷积层的优势:更少参数,更高效率
- 对比全连接层:
- 假设卷积核大小为 3×3,输入通道 3,输出通道 10,那么参数仅为 3×3×3×10=270 个,远少于全连接层的数十亿参数。
- 归纳偏置的作用:
- 卷积神经网络利用图像的 “先验知识”(平移不变和局部性),称为 “归纳偏置”。如果这些假设符合现实(如自然图像),模型能更快收敛,泛化能力更强;但若假设不成立(如非平移不变的数据),可能效果不佳。
延伸思考
- 如果卷积核大小为 0(Δ=0),相当于每个像素独立处理,类似全连接层(但通道独立)。
- 平移不变性的缺点:如果物体在不同位置有不同含义(如文字顺序),可能不适用。
- 图像边界问题:边缘像素的局部窗口可能超出图像范围,需考虑填充(padding)或忽略。
- 卷积在音频、文本中的应用:音频是一维信号(时间序列),可使用一维卷积;文本是序列数据,一维卷积可提取 n-gram 特征(如 “你好”“世界” 等相邻词语的组合)。
图像卷积
互相关运算:卷积层的核心操作
- 什么是互相关?
互相关是卷积层的实际运算过程,简单来说就是用一个卷积核(小窗口)在输入图像上滑动,每次滑动时将窗口内的图像像素与卷积核对应位置的数值相乘,再把结果相加,得到一个输出值。
- 例子:如图 6.2.1 所示,输入是 3×3 的图像,卷积核是 2×2 的矩阵。当卷积核从左上角开始滑动时,第一个输出值计算为:
0×0 + 1×1 + 3×2 + 4×3 = 19,依次滑动得到最终的 2×2 输出矩阵。
- 例子:如图 6.2.1 所示,输入是 3×3 的图像,卷积核是 2×2 的矩阵。当卷积核从左上角开始滑动时,第一个输出值计算为:
- 输出大小的计算
输出图像的尺寸会比输入小,计算公式为:
(输入高度 - 卷积核高度 + 1) × (输入宽度 - 卷积核宽度 + 1)。 例如,3×3 输入用 2×2 卷积核,输出是 2×2(3-2+1=2)。
卷积层:带参数的互相关运算
-
卷积层的组成 卷积层由卷积核权重和偏置两个可学习的参数组成。
- 权重:即卷积核的数值,通过训练学习得到,用于提取特征。
- 偏置:一个额外的常数,用于调整输出值,类似全连接层的偏置。
-
代码实现 用 Python 代码定义了一个简单的卷积层
Conv2D,通过corr2d函数实现互相关运算,再加上偏置得到输出。例如:class Conv2D(nn.Module):
def __init__(self, kernel_size):
super().__init__()
self.weight = nn.Parameter(torch.rand(kernel_size)) # 随机初始化卷积核权重
self.bias = nn.Parameter(torch.zeros(1)) # 偏置初始化为0
def forward(self, x):
return corr2d(x, self.weight) + self.bias # 互相关运算+偏置
边缘检测:卷积层的简单应用
- 目标:检测图像中颜色变化的边缘
构造一个黑白图像(中间四列为黑色,其余为白色),用一个简单的卷积核
[1, -1]检测垂直边缘。- 原理:当卷积核滑过图像时,如果相邻像素值不同(如白 → 黑或黑 → 白),输出非零值;如果相同(如白 → 白),输出 0。
- 结果:输出图像中,
1表示白 → 黑的边缘,-1表示黑 → 白的边缘,其余为 0(如图 6.2.3 所示)。
- 局限性 该卷积核只能检测垂直边缘,无法检测水平边缘。若将图像转置后再用同样的卷积核运算,输出全为 0,说明卷积核具有方向性。
学习卷积核:从数据中自动优化参数
- 为什么需要学习卷积核?
手动设计复杂的卷积核(如检测多种特征)非常困难,因此可以通过训练让模型自动学习卷积核权重。
- 方法:
- 随机初始化卷积核权重。
- 计算预测输出与真实输出的误差(如均方误差)。
- 通过反向传播更新权重,减小误差。
- 方法:
填充和步幅
为什么需要填充和步幅
- 填充的目的: 当使用卷积核处理图像时,输出尺寸会变小(例如 3×3 输入用 2×2 卷积核,输出 2×2),导致边缘像素丢失。填充就是在图像周围添加一圈 “边缘”(通常是 0),避免信息丢失,同时可以控制输出尺寸与输入相同。
- 步幅的目的: 控制卷积核滑动的步长。步幅为 1 时,卷积核每次移动 1 个像素;步幅为 2 时,每次移动 2 个像素,可快速降低图像尺寸,减少计算量。
填充:给图像加 “边框”
-
什么是填充? 在图像的上下左右边缘添加若干行 / 列的像素(通常填 0),使得卷积后的输出尺寸更大。
-
填充如何影响输出尺寸? 设输入尺寸为$(n_h \times n_w)$,卷积核尺寸$(k_h \times k_w)$,上下填充$p_h$行,左右填充$p_w$列,则输出尺寸为:$(n_h - k_h + p_h + 1) \times (n_w - k_w + p_w + 1)$
- 保持输出与输入同尺寸:当$(p_h = k_h - 1)$且$(p_w = k_w - 1)$时,输出尺寸等于输入尺寸。例如,3×3 输入用 3×3 卷积核,填充 1 圈 0,输出仍为 3×3。
- 奇数卷积核的优势:常用奇数卷积核(如 3×3、5×5),因为可以在上下 / 左右填充相同行数 / 列数,保持对称(如 3×3 核填充 1 行 / 列,两边各加 0.5 行 / 列,实际取整后对称)。
-
代码示例:
# 用3×3卷积核,填充1行/列,输入8×8,输出8×8
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1)
X = torch.rand(8, 8)
print(comp_conv2d(conv2d, X).shape) # 输出: torch.Size([8, 8])
步幅:大步滑动卷积核
-
什么是步幅? 卷积核在图像上滑动的间隔距离。步幅为 1 时,每次移动 1 个像素;步幅为 2 时,每次跳过 1 个像素,直接移动 2 个像素。
- 例子:5×5 输入用 2×2 卷积核,步幅 3,输出尺寸为 2×2(滑动时超出边界则停止)。
-
步幅如何影响输出尺寸? 设垂直步幅$s_h$,水平步幅$s_w$,则输出尺寸为:$(\left\lfloor \frac{n_h - k_h + p_h + s_h}{s_h} \right\rfloor \times \left\lfloor \frac{n_w - k_w + p_w + s_w}{s_w} \right\rfloor)$
- 简化情况:若填充$(p_h = k_h - 1)$,$(p_w = k_w - 1)$,则输出尺寸约为$(\frac{n_h}{s_h} \times \frac{n_w}{s_w})$(若能整除)。例如,8×8 输入,步幅 2,输出 4×4。
# 步幅2,输入8×8,输出4×4
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1, stride=2)
print(comp_conv2d(conv2d, X).shape) # 输出: torch.Size([4, 4])
填充和步幅的组合应用
- 灵活调整尺寸:
- 填充用于保留边缘信息或扩大尺寸,步幅用于快速降维。
- 例如:输入 240×240,用 5×5 卷积核,填充 2,步幅 3,则输出尺寸为:$(\frac{240 - 5 + 2 \times 2 + 3}{3} = 80 \quad \Rightarrow \quad 80 \times 80)$
- 奇数核 + 对称填充 + 步幅 1: 这是最常见的组合(如 ResNet 等模型),可确保输出与输入同尺寸,且卷积核中心对准输入像素,便于特征对齐。
多输入和多输出通道
通道是什么
- 类比理解:
- 通道就像图像的 “维度扩展”。例如,彩色照片有 RGB 三个通道(红、绿、蓝),每个通道是一个二维像素矩阵,合起来组成三维张量(高度 × 宽度 × 通道数)。
- 在神经网络中,每个通道可以理解为一个 “特征探测器”,负责提取不同的信息(如边缘、纹理、颜色等)。
- 数学表示:
- 输入图像的通道数记为$(c_i)$(如 RGB 图像$(c_i=3)$),输出通道数记为$(c_o)$(由卷积核数量决定)。
- 卷积核的形状为$(c_o \times c_i \times k_h \times k_w)$,其中$(k_h \times k_w)$是空间窗口大小。
多输入通道:处理彩色图像
-
核心逻辑: 当输入有多个通道时,卷积核必须有相同的输入通道数,每个通道分别进行互相关运算,再将结果相加。
- 例子:输入是 2 通道的图像,卷积核也有 2 个通道(每个通道是 2×2 的矩阵)。计算时,每个输入通道与对应的卷积核通道相乘求和,最后将两个通道的结果相加,得到单通道的输出。
-
代码实现:
def corr2d_multi_in(X, K):
# X和K按通道遍历,每个通道做互相关后求和
return sum(d2l.corr2d(x, k) for x, k in zip(X, K))其中,X 是输入张量(形状为$(c_i \times h \times w)$),K 是卷积核张量(形状为$(c_i \times k_h \times k_w)$)。
多输出通道:提取多种特征
-
核心逻辑: 每个输出通道对应一个独立的卷积核,每个卷积核在所有输入通道上运算,输出一个特征图。多个卷积核的结果叠加,形成多通道输出。
- 例子:使用 3 个卷积核,每个核的形状为$(2 \times 2 \times 2)$(2 输入通道,2×2 空间窗口),输出就是 3 通道的特征图,每个通道对应一种特征(如边缘、纹理、颜色)。
-
代码实现:
def corr2d_multi_in_out(X, K):
# 对每个卷积核(输出通道)单独计算,再堆叠结果
return torch.stack([corr2d_multi_in(X, k) for k in K], 0)其中,K 的形状为$(c_o \times c_i \times k_h \times k_w)$,每个 k 是一个输出通道对应的卷积核。
1×1 卷积:升降维
-
表面矛盾: 1×1 卷积核的空间窗口只有 1×1 像素,无法提取相邻像素的空间特征,那它有什么用?
-
实际作用:
- 通道升降维,仅改变通道数而不改变空间特征:
- 例如,输入是 256 通道,使用 1×1 卷积核(输出通道 64),可将通道数压缩为 64,减少后续计算量(会损失信息)。
- 跨通道交互:
- 在每个像素位置,1×1 卷积相当于一个全连接层,将多个输入通道的信息线性组合成新的输出通道。
- 例如,输入 3 通道,输出 2 通道,每个输出像素是输入同位置 3 个通道的加权和(类似全连接层的矩阵乘法)。
- 通道升降维,仅改变通道数而不改变空间特征:
-
数学本质: 1×1 卷积的计算等价于对每个像素的通道维度做全连接变换。假设输入形状为$(c_i \times h \times w)$,卷积核形状为$(c_o \times c_i \times 1 \times 1)$,则运算可拆解为:
def corr2d_multi_in_out_1x1(X, K):
c_i, h, w = X.shape
c_o = K.shape[0]
# 将每个像素的通道展平为向量,与卷积核做矩阵乘法
X = X.reshape((c_i, h * w)) # 形状:[c_i, h*w]
K = K.reshape((c_o, c_i)) # 形状:[c_o, c_i]
Y = torch.matmul(K, X) # 矩阵乘法,形状:[c_o, h*w]
return Y.reshape((c_o, h, w))
汇聚层
汇聚层的核心作用:让特征更鲁棒、降低计算量
- 类比理解: 假设你在看一张猫的照片,汇聚层就像用放大镜观察局部区域后 “总结” 出关键点(比如 “这里有胡须”),而不是关注每个像素的精确位置。这样即使猫的位置稍微移动,依然能识别出关键特征。
- 两大目标:
- 平移不变性:减少模型对物体位置的敏感性(如猫在图片左或右都能被识别)。
- 降采样:降低特征图的空间尺寸(如从 100×100→50×50),减少计算量,同时保留主要特征。
最大汇聚层 vs 平均汇聚层:如何 “总结” 区域特征
最大汇聚层
-
操作:在每个固定大小的窗口(如 2×2)中,取所有像素的最大值作为输出。
-
例子:输入矩阵:
0 1 2
3 4 5
6 7 8用 2×2 窗口做最大汇聚,第一个窗口(左上角)的最大值是 4(0,1,3,4 中的最大值),最终输出:
4 5
7 8
-
-
适用场景:提取突出特征(如边缘、斑点),因为最大值能保留最显著的信息。
平均汇聚层
-
操作:在窗口中计算所有像素的平均值作为输出。
-
例子:上述输入的 2×2 窗口平均值为:第一个窗口平均值 =(0+1+3+4)/4=2,输出:
2 3
5 6
-
-
适用场景:平滑特征,减少噪声影响,适用于背景复杂的图像。
填充和步幅:控制输出尺寸的关键
-
填充(Padding)
:在输入边缘添加空白(通常为 0),避免边缘特征被忽略,同时控制输出尺寸。
- 例子:输入 4×4,汇聚窗口 3×3,填充 1 圈 0 后,输出仍为 4×4(否则为 2×2)。
-
步幅(Stride)
:汇聚窗口滑动的间隔。步幅越大,输出尺寸越小。
- 例子:输入 4×4,窗口 2×2,步幅 2,则输出 2×2(窗口每次移动 2 像素)。
-
公式:输出尺寸 =$\left\lfloor \frac{输入尺寸 - 窗口尺寸 + 2×填充}{步幅} \right\rfloor + 1$。
多通道处理:各通道独立运算
- 规则:汇聚层对每个通道单独操作,输出通道数与输入相同。
- 例子:输入是 2 通道的特征图,每个通道分别进行最大汇聚,输出仍为 2 通道,每个通道的尺寸按窗口和步幅调整。
- 代码示例:
# 输入形状:(批量, 通道, 高度, 宽度)
X = torch.cat((X, X+1), dim=1) # 2通道输入
pool2d = nn.MaxPool2d(3, padding=1, stride=2)
output = pool2d(X) # 输出通道数仍为2
汇聚层与卷积层的对比
| 层类型 | 参数 | 运算方式 | 输出尺寸影响 | 核心功能 |
|---|---|---|---|---|
| 卷积层 | 有权重 | 像素与核的互相关运算 | 由核大小、填充、步幅决定 | 特征提取(空间 + 通道) |
| 汇聚层 | 无参数 | 取窗口内最大值 / 平均值 | 由窗口、填充、步幅决定 | 特征聚合、降维、抗平移 |
卷积神经网络 LeNet
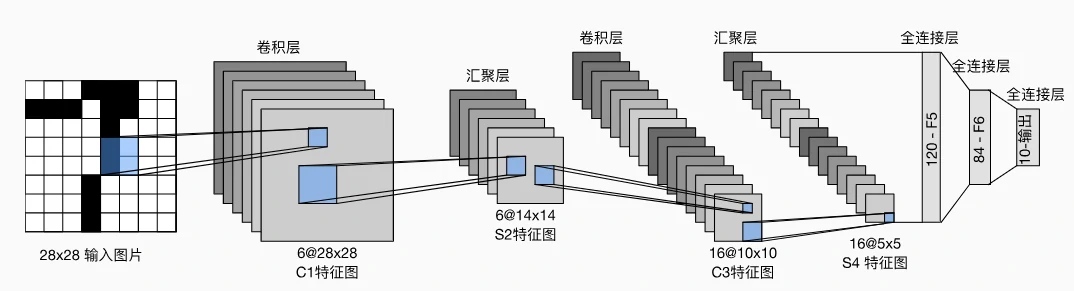
1.LeNet 的网络结构:卷积与全连接的结合
LeNet 的架构分为两部分:卷积编码器(提取图像特征)和全连接层(分类决策),具体如下:
卷积编码器:两层卷积
- 第一层卷积:
- 输入:28×28 的单通道图像(手写数字通常为黑白图像)。
- 操作:使用 6 个 5×5 的卷积核,填充 2 像素(保持输出尺寸不变),激活函数为 sigmoid。
- 输出:6 个 28×28 的特征图(通道数增加到 6)。
- 汇聚:2×2 平均汇聚层,步幅 2,输出变为 6 个 14×14 的特征图(尺寸减半)。
- 第二层卷积:
- 操作:16 个 5×5 的卷积核,无填充(输出尺寸减少 4 像素),激活函数为 sigmoid。
- 输出:16 个 10×10 的特征图。
- 汇聚:2×2 平均汇聚层,步幅 2,输出变为 16 个 5×5 的特征图(尺寸再次减半)。
全连接层:从特征到分类
- 展平操作:将 16 个 5×5 的特征图展平为 16×5×5=400 维的向量。
- 三层全连接:
- 第一层:400→120 维,激活函数 sigmoid。
- 第二层:120→84 维,激活函数 sigmoid。
- 第三层:84→10 维(对应 10 个数字类别),无激活函数(直接输出分类概率)。
关键特点:
- 卷积层通过 “空间下采样”(汇聚层)减少尺寸,同时增加通道数(从 1→6→16),逐步提取更复杂的特征(如从边缘到数字形状)。
- 全连接层将高维特征映射到分类结果,类似传统神经网络的决策过程。
LeNet 的代码实现
import torch.nn as nn
net = nn.Sequential(
# 第一层卷积+汇聚
nn.Conv2d(1, 6, kernel_size=5, padding=2), # 输入1通道,输出6通道,5x5卷积,填充2
nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), # 2x2平均汇聚,尺寸减半
# 第二层卷积+汇聚
nn.Conv2d(6, 16, kernel_size=5), # 输入6通道,输出16通道,5x5卷积(无填充)
nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), # 尺寸再次减半
# 全连接层
nn.Flatten(), # 展平为一维向量
nn.Linear(16*5*5, 120), nn.Sigmoid(), # 400→120
nn.Linear(120, 84), nn.Sigmoid(), # 120→84
nn.Linear(84, 10) # 84→10(分类输出)
)
第七章 改进的卷积神经网络
深度卷积神经网络 AlexNet
- 相比 LeNet,AlexNet 在更大数据集上表现更优,证明了**端到端学习(直接从像素到结果)**的可行性,颠覆了“手工特征优先”的传统观念,推动了后续更深网络(如 VGG、ResNet)的发展。
传统方法的局限
- LeNet 的不足:早期的卷积神经网络(如 LeNet)在小数据集上表现不错,但在更大、更真实的数据集(如图像分辨率更高、类别更多的场景)中效果有限。
- 传统机器学习的套路:2012 年之前,计算机视觉主要依赖手工设计的特征(如 SIFT、HOG 等),流程是: 收集数据 → 手工预处理(如调整像素)→ 提取人工特征(如边缘、纹理)→ 用分类器(如支持向量机)识别。 当时研究者认为,数据和特征设计比算法更重要,机器学习算法(如神经网络)常被忽视。
- 技术瓶颈:
- 数据少:早期数据集规模小(如 UCI 数据集只有几百到几千张低分辨率图像)。
- 硬件弱:CPU 计算能力不足,无法训练参数多的深层神经网络。
- 缺少关键技巧:如合适的参数初始化方法、ReLU 激活函数、Dropout 正则化等。
架构
比 LeNet 更深、更强大
-
核心改进:
- 层数更多:LeNet 只有几层,而 AlexNet 有 8 层(五个卷积层、两个全连接隐藏层和一个全连接输出层),能提取更复杂的特征(如底层边缘 → 高层物体部件 → 整体物体)。
- 激活函数:用 ReLU 代替 Sigmoid,解决了 Sigmoid 在梯度反向传播时容易“梯度消失”的问题,训练更高效。
- Dropout 正则化:在全连接层加入 Dropout,随机丢弃部分神经元,减少过拟合。
- 数据增强:训练时对图像进行翻转、裁剪、变色等处理,增加数据多样性,提升模型鲁棒性。
- 更大的卷积窗口与通道数:第一层用 11×11 的卷积核(LeNet 用 5×5),提取更大范围的特征;通道数更多(如 96、256 通道),捕捉更丰富的视觉信息。
-
网络结构示例
net = nn.Sequential(
# 第一层:大卷积核+ReLU+最大池化
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(3, stride=2),
# 后续卷积层:逐步缩小窗口,增加通道数
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(3, stride=2),
# 全连接层:参数多,用Dropout防过拟合
nn.Linear(6400, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 10) # 输出层(如Fashion-MNIST的10个类别)
)
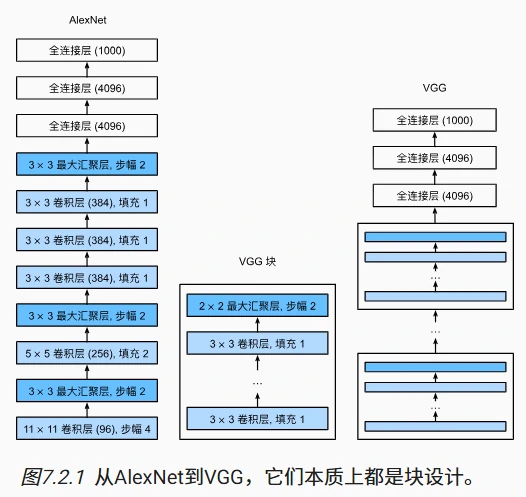
使用块的网络 VGG
VGG 的核心思路:用“块”搭建网络
- 灵感来源:之前的 AlexNet 证明了深层网络的有效性,但没有统一的设计框架。VGG 提出用**重复的块(Block)**来构建网络,就像搭积木一样,每个块由多个卷积层和一个池化层组成。
- 块的结构:
- 每个 VGG 块包含 多个 3×3 的卷积层(通常 2-3 个),每个卷积层后接 ReLU 激活函数,并用 padding=1 保持图像尺寸不变。
- 每个块的最后有一个 2×2 最大池化层,步幅为 2,将图像尺寸减半(例如从 224×224→112×112)。
- 这样的设计让网络可以逐层提取更复杂的特征,同时通过池化层降低计算量。
VGG 网络的架构细节
 - 卷积层部分:
- 卷积层部分:
-
VGG 有多种变体(如 VGG-11、VGG-16、VGG-19),数字代表总层数。以 VGG-11 为例:
- 由 5 个 VGG 块组成,每个块的卷积层数和输出通道数如下:
- 块 1:1 个卷积层,64 通道
- 块 2:1 个卷积层,128 通道
- 块 3:2 个卷积层,256 通道
- 块 4:2 个卷积层,512 通道
- 块 5:2 个卷积层,512 通道
- 每个块通过池化层将图像尺寸减半,最终尺寸从 224×224→7×7。
- 由 5 个 VGG 块组成,每个块的卷积层数和输出通道数如下:
-
全连接层部分:
- 与 AlexNet 类似,包含 3 层全连接层(4096→4096→10),中间用 Dropout 防止过拟合,输出层对应分类类别(如 Fashion-MNIST 的 10 类)。
-
代码实现:
通过循环生成多个 VGG 块,例如:
# 定义一个VGG块,包含num_convs个卷积层和1个池化层
def vgg_block(num_convs, in_channels, out_channels):
layers = []
for _ in range(num_convs):
layers.append(卷积层(3x3, 填充=1, 输出通道=out_channels))
layers.append(ReLU激活函数)
in_channels = out_channels
layers.append(最大池化层(2x2, 步幅=2))
return 组合这些层为一个块
网络中的网络 NiN
NiN 的核心改进:用“小网络”替代全连接层
- 传统 CNN 的问题:像 AlexNet 和 VGG 这样的网络,在卷积层之后使用全连接层进行分类。全连接层会将空间特征(如图像的宽、高维度)压缩成一维向量,可能丢失空间结构信息,且容易过拟合(参数多)。
- NiN 的解决方案:
- 在每个像素的通道维度上应用一个“小型多层感知机(MLP)”,相当于用多个 1×1 卷积层模拟全连接层的计算,保留空间结构的同时增加非线性。
- 最终用全局平均汇聚层替代全连接层,直接对每个通道的全局信息求和,输出分类结果,大幅减少参数数量。
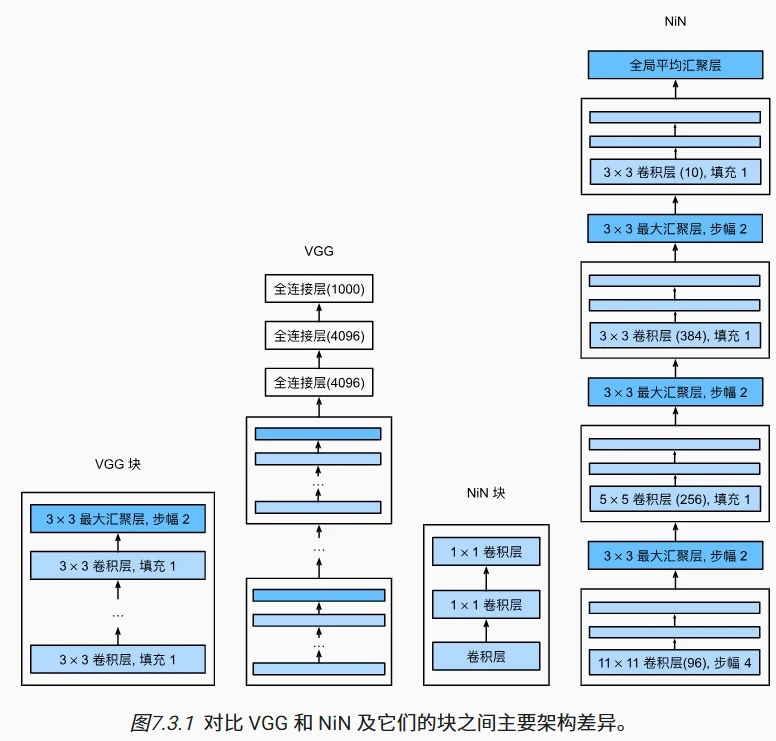
NiN 块的结构:三次卷积,增强特征表达
-
块的组成:每个 NiN 块包含 1 个普通卷积层 + 2 个 1×1 卷积层,结构如下:
def nin_block(输入通道, 输出通道, 卷积核大小, 步幅, 填充):
return 顺序连接:
普通卷积层(提取空间特征)→ ReLU激活
1×1卷积层(压缩通道或增加非线性)→ ReLU激活
1×1卷积层(进一步处理特征)→ ReLU激活- 普通卷积层:负责提取传统的空间特征(如边缘、纹理)。
- 1×1 卷积层:相当于在每个像素的通道维度上进行全连接运算,可理解为“每个像素自己的小神经网络”,能捕捉通道间的关联(例如,将 RGB 三通道的信息融合)。
-
作用:通过多层卷积叠加,每个像素的特征会被更复杂地变换,增强模型对局部模式的表达能力。
NiN 网络架构:取消全连接,全局汇聚分类
-
整体结构:NiN 由多个 NiN 块和最大汇聚层交替组成,最后接全局平均汇聚层和输出层,具体如下:
- 卷积层部分:
- 第一层:11×11 卷积(类似 AlexNet),提取大尺度特征,接最大池化(缩小尺寸)。
- 中间层:5×5 和 3×3 卷积,逐步提取更细粒度特征,每次卷积后接最大池化。
- 每个 NiN 块后通过池化层(如 3×3 最大池化,步幅 2)降低图像尺寸,减少计算量。
- 分类部分:
- 最后一个 NiN 块输出通道数等于类别数(如 Fashion-MNIST 的 10 类)。
- 用全局平均汇聚层替代全连接层:对每个通道的所有像素求平均值,得到长度为通道数的一维向量,直接作为分类器输入。
- 优点:避免全连接层的过拟合问题,参数数量大幅减少(例如,假设最后一层是 10 通道的 7×7 特征图,全局平均汇聚直接求和,无需权重参数)。
- 卷积层部分:
NiN 与 AlexNet/VGG 的对比
| 维度 | AlexNet/VGG | NiN |
|---|---|---|
| 全连接层 | 有,参数多,易过拟合 | 无,用全局平均汇聚替代 |
| 特征处理 | 卷积层提取空间特征,全连接层压缩特征 | 每个像素用 1×1 卷积(小网络)处理特征,保留空间结构 |
| 参数数量 | 多(全连接层占大部分参数) | 少(取消全连接层,1×1 卷积参数少) |
| 计算效率 | 计算量大,需更多显存 | 计算量较小,但训练时间可能因多层卷积增加 |
含并行连结的网络 GoogleNet
GoogLeNet 的核心创新:Inception 块
Inception 块的设计思想
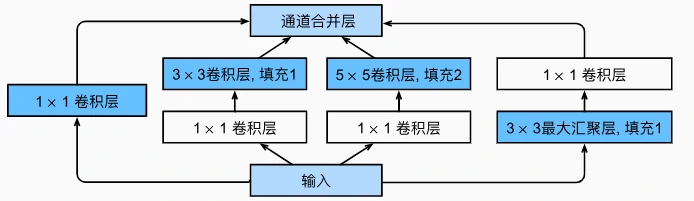
- 并行多分支结构:每个 Inception 块包含 4 条并行路径,分别使用不同大小的卷积核(1×1、3×3、5×5)和最大池化层,从多个尺度提取特征。
- 路径 1:1×1 卷积层,捕捉全局特征或压缩通道数。
- 路径 2:1×1 卷积层(降维)+ 3×3 卷积层,捕捉中等尺度特征。
- 路径 3:1×1 卷积层(降维)+ 5×5 卷积层,捕捉大尺度特征。
- 路径 4:3×3 最大池化层 + 1×1 卷积层,捕捉边缘等底层特征并调整通道数。
- 特征融合:将 4 条路径的输出在通道维度上拼接,形成包含多尺度信息的特征图。
设计优势
- 多尺度特征捕捉:不同大小的卷积核可提取不同范围的特征(如 1×1 捕捉细节,5×5 捕捉整体结构),提升模型对复杂图像的适应性。
- 计算效率优化:通过 1×1 卷积层降维(如路径 2、3),减少参数量和计算量。例如,先将输入通道数从$( C )$降至$( c )$,再进行 3×3 卷积,计算量从$( C \times 3 \times 3 \times H \times W )$降至$( c \times 3 \times 3 \times H \times W )$($( c \ll C )$)。
- 避免单一卷积核的局限性:传统网络使用固定大小的卷积核,可能遗漏其他尺度的特征,而 Inception 块通过并行结构实现“特征互补”。
GoogLeNet 整体架构
层级结构
GoogLeNet 由输入层、多个 Inception 块、池化层和全局平均汇聚层组成,共包含 9 个 Inception 块,整体结构分为 5 个模块(b1 到 b5):
-
模块 b1: 7×7 卷积层(64 通道,步幅 2),用于提取基础特征,后接 3×3 最大池化层(步幅 2)降低分辨率。
-
模块 b2: 1×1 卷积层(64 通道)降维,接 3×3 卷积层(192 通道),后接 3×3 最大池化层(步幅 2)。
-
模块 b3:
- 串联 2 个 Inception 块:
- 第一个 Inception 块:输出通道数为 64(1×1)+ 128(3×3)+ 32(5×5)+ 32(池化)= 256。
- 第二个 Inception 块:输出通道数为 128 + 192 + 96 + 64 = 480。
- 后接 3×3 最大池化层(步幅 2)。
- 串联 2 个 Inception 块:
-
模块 b4:
- 串联 5 个 Inception 块,逐步增加通道数(如从 512 到 832),捕捉更复杂的多尺度特征。
- 后接 3×3 最大池化层(步幅 2)。
-
模块 b5: 串联 2 个 Inception 块,最终通过全局平均汇聚层将特征图压缩为一维向量,接全连接层输出分类结果(如 1000 类)。
-
取消全连接层:与 NiN 类似,GoogLeNet 在最后使用全局平均汇聚层替代全连接层,减少参数数量并避免过拟合。
-
深度与宽度的平衡:通过堆叠多个 Inception 块增加网络深度,同时通过并行分支扩展特征的宽度(通道数),在保持计算效率的前提下提升模型能力。
Inception 块的代码示例
class Inception(nn.Module):
def __init__(self, in_channels, c1, c2, c3, c4):
super().__init__()
# 四条路径的定义
self.p1 = nn.Conv2d(in_channels, c1, kernel_size=1)
self.p2 = nn.Sequential(
nn.Conv2d(in_channels, c2[0], kernel_size=1),
nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
)
self.p3 = nn.Sequential(
nn.Conv2d(in_channels, c3[0], kernel_size=1),
nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
)
self.p4 = nn.Sequential(
nn.MaxPool2d(kernel_size=3, stride=1, padding=1),
nn.Conv2d(in_channels, c4, kernel_size=1)
)
def forward(self, x):
p1 = F.relu(self.p1(x))
p2 = F.relu(self.p2(x))
p3 = F.relu(self.p3(x))
p4 = F.relu(self.p4(x))
return torch.cat((p1, p2, p3, p4), dim=1) # 通道维度拼接
批量规范化
为什么需要批量规范化
训练深层神经网络时会遇到以下问题:
- 内部协变量偏移(Internal Covariate Shift): 随着训练进行,中间层的输出分布会发生变化(例如,某层输出的均值和方差逐渐变大或变小),导致模型需要不断调整参数来适应这种变化,训练速度变慢,甚至出现梯度消失/爆炸。
- 参数尺度不一致: 不同层的输出可能具有不同的尺度(如一层输出是 0-1,另一层是 100-200),导致优化器难以高效更新参数。
- 过拟合风险: 深层网络容易过拟合,需要更强的正则化手段。
批量规范化的核心思路:在每层的输入前对数据进行标准化(均值为 0,方差为 1),并引入可学习的缩放和偏移参数,让网络自动调整最优分布,从而加速训练并提升泛化能力。
批量规范化的工作原理
1. 训练阶段
对于一个小批量数据$( B )$,批量规范化的计算步骤如下:
- 标准化: $\hat{x} = \frac{x - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}}$ 其中,$( \mu_B )$是小批量的均值,$( \sigma_B^2 )$是方差,$( \epsilon )$是一个很小的常数(避免除以零)。
- 缩放与偏移: $[ y = \gamma \odot \hat{x} + \beta ]$ $( \gamma )$(缩放参数)和$( \beta )$(偏移参数)是可学习的参数,用于调整标准化后的数据分布(例如,恢复有用的特征尺度)。
2. 预测阶段
- 由于预测时通常处理单样本或小批量数据,无法计算可靠的均值和方差,因此使用训练阶段记录的**移动平均值(moving average)**来替代$( \mu_B )$和$( \sigma_B^2 )$,确保输出的稳定性。
批量规范化在不同层中的应用
1. 全连接层
- 应用位置:全连接层的仿射变换($( Wx + b )$)之后,激活函数之前。
- 标准化对象:在特征维度上进行(即对每个特征的所有样本求均值和方差)。
2. 卷积层
- 应用位置:卷积层之后,激活函数之前。
- 标准化对象:在通道维度上进行。对于每个通道,收集该通道在所有空间位置和样本上的值,计算均值和方差(例如,输入形状为$( (批量大小, 通道数, 高, 宽) )$,则在批量、高、宽维度上求均值/方差,保留通道维度)。
批量规范化的关键作用
- 加速训练收敛: 通过固定中间层的分布,减少内部协变量偏移,使梯度更新更稳定,允许使用更大的学习率,从而加快收敛速度。
- 缓解梯度消失/爆炸: 标准化后的数据分布更接近激活函数的有效区间(如 ReLU 的非负区间),避免神经元进入饱和区域,保持梯度有效性。
- 充当正则化角色: 训练时使用小批量的均值/方差引入了一定的噪声,类似数据增强,有助于抑制过拟合(尤其在批量较小时,噪声效应更明显)。
- 允许更灵活的网络设计: 例如,使用批量规范化后,网络对权重初始化的敏感度降低,更容易训练深层网络(如 100 层以上的 ResNet)。
代码实现与注意事项
import torch
import torch.nn as nn
class BatchNorm(nn.Module):
def __init__(self, num_features, eps=1e-5, momentum=0.9):
super().__init__()
self.eps = eps
self.momentum = momentum
# 可学习的缩放和偏移参数
self.gamma = nn.Parameter(torch.ones(num_features))
self.beta = nn.Parameter(torch.zeros(num_features))
# 移动平均的均值和方差(预测时使用)
self.register_buffer('moving_mean', torch.zeros(num_features))
self.register_buffer('moving_var', torch.ones(num_features))
def forward(self, x):
if self.training:
# 训练阶段:计算当前小批量的均值和方差
if x.dim() == 2: # 全连接层输入(批量, 特征)
mean = x.mean(dim=0)
var = x.var(dim=0, unbiased=False)
else: # 卷积层输入(批量, 通道, 高, 宽)
mean = x.mean(dim=(0, 2, 3), keepdim=True)
var = x.var(dim=(0, 2, 3), keepdim=False)
# 更新移动平均
self.moving_mean = self.moving_mean * self.momentum + mean * (1 - self.momentum)
self.moving_var = self.moving_var * self.momentum + var * (1 - self.momentum)
else:
# 预测阶段:使用移动平均的均值和方差
mean = self.moving_mean
var = self.moving_var
# 标准化 + 缩放偏移
x_hat = (x - mean) / torch.sqrt(var + self.eps)
return self.gamma * x_hat + self.beta
- 批量大小的影响:批量越大,均值和方差的估计越准确,训练效果越好;批量为 1 时无法计算(均值相减后全为 0)。
- 位置选择:通常位于卷积层或全连接层之后,激活函数之前,但某些架构(如 ResNet)可能有不同安排。
- 与 Dropout 的配合:两者可共存,但需注意顺序(通常先 BN,再 Dropout 或激活函数)。
ResNet残差网络
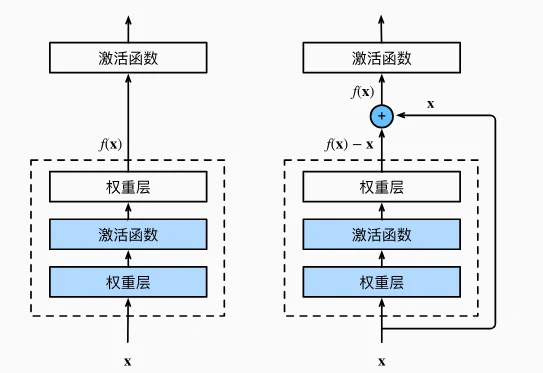
传统神经网络层数加深时,性能可能下降,效果可能变差(梯度消失或爆炸问题)。而Residual Network通过残差连接能解决该问题。 核心设计:传统网络层直接拟合目标映射$(f(x))$,而残差块拟合的是“残差映射”$(f(x)-x)$。
- 如果理想输出接近输入(恒等映射),只需让残差部分接近 0,学习难度大幅降低。(不接近就没大用)
- 残差块通过“跨层连接”(捷径)将输入直接加到输出上,避免信息在深层传播中丢失。(这个很重要)
残差块
一个典型的残差块由以下部分组成:
卷积层:通常包含 2-3 个卷积操作(如 3×3 卷积),用于提取特征;
批归一化(Batch Normalization):加速训练,缓解梯度消失;
激活函数:如 ReLU,引入非线性;
跳跃连接(Skip Connection):将输入 x 直接加到卷积层的输出上(需保证维度匹配)。
若输入与输出通道数或尺寸不同,用 1×1 卷积调整输入(use_1x1conv=True),确保能与输出相加。
ResNet整体架构
- 基础模块:
由多个残差块组成,每个模块内的残差块输出通道数相同,且第一个残差块可能通过步幅和 1×1 卷积调整尺寸和通道数。
- 例如:ResNet-18 包含 4 个模块,每个模块有 2 个残差块,共 18 层(含卷积和全连接层)。
- 网络流程:
- 初始层:7×7 卷积(步幅 2)+ 批量归一化 + ReLU + 3×3 最大池化(步幅 2),缩小尺寸并提取特征。
- 残差模块:依次将通道数从 64 翻倍到 128、256、512,同时尺寸减半(如从 56×56 到 28×28,再到 14×14、7×7)。
- 结尾层:全局平均池化 + 全连接层,输出分类结果(如图 7.6.4)。
DenseNet稠密连接网络
从 ResNet 到 DenseNet
- ResNet 的局限与灵感:
ResNet 通过“跨层相加”让网络学习“残差”($(f(x) = x + g(x))$),解决了深层网络训练难题。但 DenseNet 进一步思考:如果把每一层的输出连接(而非相加)起来,是否能像泰勒展开一样,让网络学习更丰富的特征组合?
- 核心区别:ResNet 的跨层连接是“相加”(保持通道数不变),而 DenseNet 是“连结”(通道数累加),如图 7.7.1 所示。
- 稠密连接的数学直观: 假设输入为$(x)$,第一层输出为$(f_1(x))$,第二层输入是$(x)$和$(f_1(x))$的连结,输出为$(f_2([x, f_1(x)]))$,依此类推。最终将所有层的特征连结,形成更全面的特征表示(如图 7.7.2)。
稠密块(Dense Block)
- 结构设计:
每个稠密块包含多个“卷积块”,每个卷积块的结构为:批量归一化(BN)→ ReLU 激活 → 3×3 卷积。
- 前向传播时,每一层的输入是前面所有层输出的连结,输出则与输入连结后传递给下一层。
- 例如:输入通道数为 3,增长率(每层输出通道数)为 10,经过 2 层稠密块后,输出通道数为$(3 + 2×10 = 23)$(如图 7.7.3 示例)。
- 增长率的意义: 增长率控制每层新增的通道数,是 DenseNet 的核心超参数。较小的增长率即可通过多层连结积累丰富特征,避免了传统网络因层数深而导致的特征“稀释”问题。
过渡层(Transition Layer):控制复杂度的“阀门
- 为什么需要过渡层?
稠密块会不断累加通道数,导致计算量爆炸。过渡层的作用是:
- 降维:用 1×1 卷积减少通道数(如减半)。
- 降采样:用平均池化(步幅 2)缩小高和宽,降低计算复杂度。
- 结构示例: 过渡层包含 BN→ReLU→1×1 卷积 → 平均池化。例如,输入通道数 23,过渡层输出通道数设为 10,则高和宽减半,通道数变为 10(如图 7.7.4 示例)。
DenseNet 整体架构:特征重用
- 网络流程:
- 初始层:与 ResNet 类似,7×7 卷积(步幅 2)+ BN + ReLU + 3×3 最大池化(步幅 2),缩小尺寸并提取初始特征。
- 稠密块+过渡层交替:
- 通常使用 4 个稠密块,每个块内有若干卷积层(如 4 层),增长率设为 32。
- 每个稠密块后接过渡层,通道数减半,尺寸减半(如从 56×56 到 28×28)。
- 结尾层:全局平均池化 + 全连接层,输出分类结果。
- 与 ResNet 的对比:
- ResNet 通过“残差块”实现跨层相加,保持通道数不变;DenseNet 通过“稠密块”实现跨层连结,通道数逐层增加。
- DenseNet 的特征重用更充分,但显存消耗更高(因连结操作存储中间结果)。